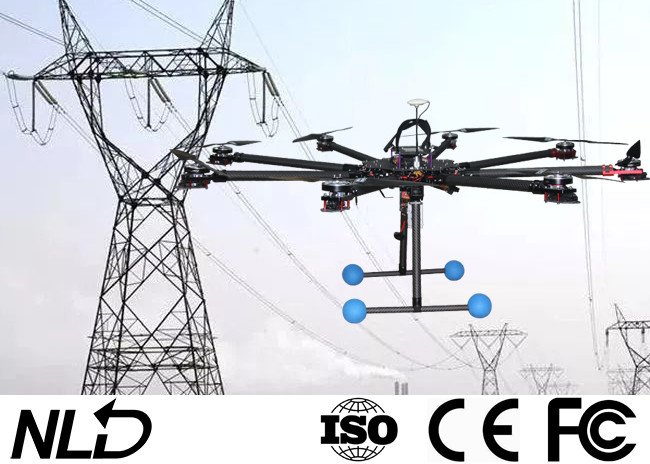
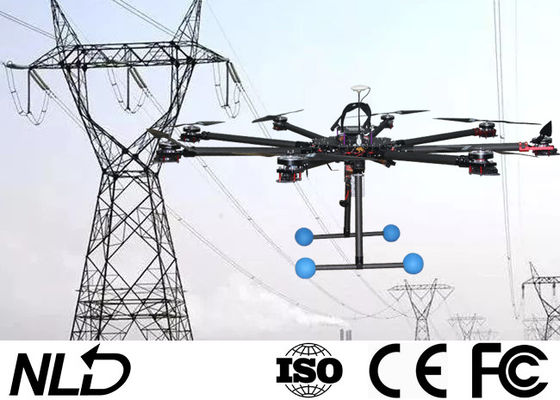
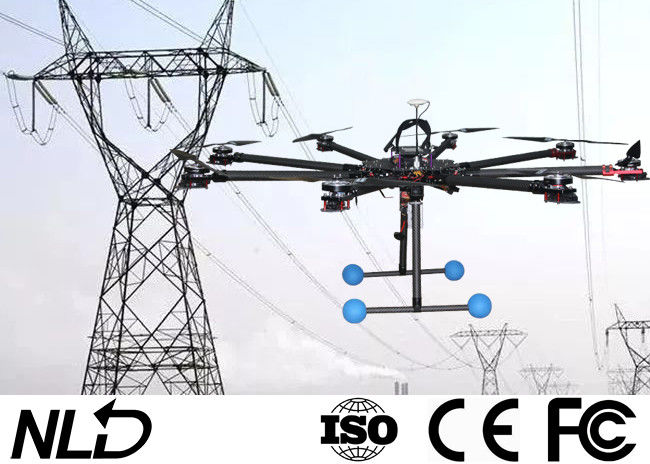
هواپیمای بدون سرنشین بدون سرنشین 8 Axis Powerline برای ساخت خطوط هوایی کشش طناب خلبان با حلقه برداشتن طناب
جزئیات سریع:
جنس: پارچه کربن ؛
کنترل از راه دور: 1500 متر ؛
حداکثر بار: 8 کیلوگرم ؛
باتری: لیتیوم 22.2v 16000mAh 6S *2
مشخصات:
| جنس بدنه | فیبر کربن کامل | حالت برخاست و فرود | برخاست و فرود عمودی |
| دوربین | آره | محدوده کنترل از راه دور | .51.5 کیلومتر |
| کنترل پرواز+GPS | DJI-NAZA V2 | حداکثر وزن پرواز | 8 کیلوگرم |
| بسته بندی | قاب آلومینیومی | نوع باتری | لیتیوم 22.2 ولت 16000 میلی آمپر ساعت |
| دوبارهکنترل موتوری | آره | بارگذاری زمان پرواز | 15-20 دقیقه |
| نمایشگر زمینی | آره | حداکثر سرعت پرواز | 14 متر بر ثانیه |
| دمای کار | -40 ℃ -60 | ارتفاع پرواز نسبی | 2000 متر |
| شارژر | دو کانال | دقت کنترل ناوبری پرواز | عمودی 0.5 متر ، افقی 1 متر |
عمل دستورالعمل
توجه: قبل از کار ، لطفاً تأیید کنید که هوا خوب است ، باران نمی بارد (این دستگاه ضد آب نیست).عوامل محیطی مانند نیروی باد می توانند بر عمر باتری تأثیر بگذارند.
مرحله 1. بررسی کنید که آیا نصب صحیح است یا خیر
هر یک از خطاهای زیر می تواند منجر به حوادث جدی شود:
(1) پروانه به اشتباه نصب شده است.
(2) آنتن و کانکتور محکم به بدنه متصل نشده یا سقوط نمی کند.
(3) قطب نما مغناطیسی می شود.
اطمینان حاصل کنید که بدن در وضعیت خوبی قرار دارد:
1. وضعیت GPS خوب است (بیش از 7 سیگنال ماهواره ای بلند می شوند).
2. همه اتصالات صحیح و در شرایط خوب هستند.
3. بررسی کنید که آیا پروانه سفت شده است (اما بیش از حد سفت نشده است) و آیا پروانه به درستی نصب شده است.
4. آیا باتری ، کنترل از راه دور ، باتری قدرت و تلفن همراه کافی است.
5 ، صندلی موتور بدنه و دنده فرود با یا بدون ترک خوردگی.
6. هیچ آوار مشخصی در داخل موتور وجود ندارد.اگر چنین است ، باید به موقع حذف شود.
7. اینکه آیا سطح پروانه به طور واضح آسیب دیده است یا خیر و هیچ لغزش روی سطح پیچ وجود ندارد.
8 ، ترتیب بوت: ابتدا قدرت کنترل از راه دور را روشن کنید ، سپس برق هواپیما را روشن کنید.
9. ترتیب خاموش شدن: ابتدا برق هواپیما را قطع کرده و سپس برق ریموت را خاموش کنید.
مرحله 2. قطب نما را کالیبره کرده و نقطه بازگشت را ثبت کنید
یاد آوردن:
(1) لطفاً در مناطقی که دارای مواد فرو مغناطیسی هستند ، مانند معادن مغناطیسی ، پارکینگ ها و ساختمانهای دارای تقویت زیرزمینی ، کالیبراسیون نکنید.
(2) هنگام کالیبراسیون از مواد فرو مغناطیسی مانند کلید ، تلفن همراه و غیره استفاده نکنید.
(3) ماژول قطب نما نمی تواند به طور معمول در قطب شمال کار کند.
(4) کالیبراسیون قطب نما بسیار مهم است ، در غیر این صورت سیستم به درستی کار نمی کند.
مراحل:
1. موقعیت نقطه برخاست ، باز و مسطح را انتخاب کرده و دید خوبی داشته باشید.
2. بال تاشو هواپیمای بدون سرنشین را به حالت باز باز کرده و قفل کنید ، پیچ بالای براکت را باز کرده و براکت را باز کرده و با پیچ ثابت کنید.
3. قدرت کنترل از راه دور و سوئیچ روی صفحه را روشن کنید.بررسی کنید که صفحه 4 "0" نمایش داده شود (در غیر این صورت ، آن را روی 0 تنظیم کنید).آنتن کنترل از راه دور باید موازی با کنترل از راه دور باشد.
4. پهپاد به باتری متصل شده و به منبع تغذیه سیستم کنترل پرواز متصل است.
5. قطب نمای کالیبراسیون: فایل F را به سرعت 3-5 بار بالا و پایین کنید تا چراغ نشانگر LED هواپیمای بدون سرنشین ثابت بماند ، وارد حالت کالیبراسیون شوید
6. نقطه بازگشت را ثبت کنید:
iz افقی (شکل 1): اپراتور هواپیمای بدون سرنشین را برمی دارد و 360 درجه به صورت افقی به 1-2.5 دور می چرخد (تا آنجا که ممکن است جهت سر موازی با سطح زمین حفظ شود) تا زمانی که LED سبز شود.

عمودی (شکل 2): اپراتور هواپیمای بدون سرنشین را برمی دارد و افقی را 360 درجه به 1-2.5 دور (تا آنجا که ممکن است سر را عمود بر زمین نگه دارد) می چرخاند تا LED سبز شود.
7. منتظر بمانید تا چراغ سبز LED چشمک بزند و چراغ سبز قبل از برخاستن به آرامی چشمک بزند.(اگر کالیبراسیون ناموفق بود و چراغ قرمز همچنان چشمک می زند ، برای تنظیم مجدد به مرحله 5 بازگردید.)
کارگاه:
حلقه را در دست بگیرید
 پیام شما باید بین 20 تا 3000 کاراکتر باشد!
پیام شما باید بین 20 تا 3000 کاراکتر باشد!